

GDT-Kシリーズは、海底の土砂を掘る浚渫(しゅんせつ)工事に威力を発揮する海上クレーンです。港湾・土木工事において、海底の土砂をグラブを使って掴み取り、港づくりをします。厳しい海上の環境にも耐えられる強度・安全性を誇り、日本国内はもちろん海外でも多く活躍しています。設計・製造は全てオーダーメイド、お客様のご要望や工事内容に応じて1台1台設計します。
製品情報

特長

高精度で効率的な作業が可能な浚渫メインのクレーン
「GPSグラブ施工管理システム」により、目視での確認が難しい海底における浚渫箇所や深度を、モニターで確認しながら作業を進めることができます。
作業進捗は記録されており、次の作業もナビゲートしてくれるため、無駄のない作業が可能です。
また「水平掘制御装置」により、掘り残しを大幅に低減。「深度計」の機能により、正確な設定深度での作業ができるため、作業の効率化にもつながります。

オペレーターの疲労や負担を軽減する振動・騒音対策
機械本体と運転席の間に防振ゴムを入れる独立防振キャビンを採用しています。
運転席に伝わる機械本体の振動を最小限に抑えます。
これまでのクレーンと比較し、オペレーターの疲労や負担を小さく抑えることができます。
また十分な防音対策を施すことにより、クレーン作業中でもストレスなく会話できます。
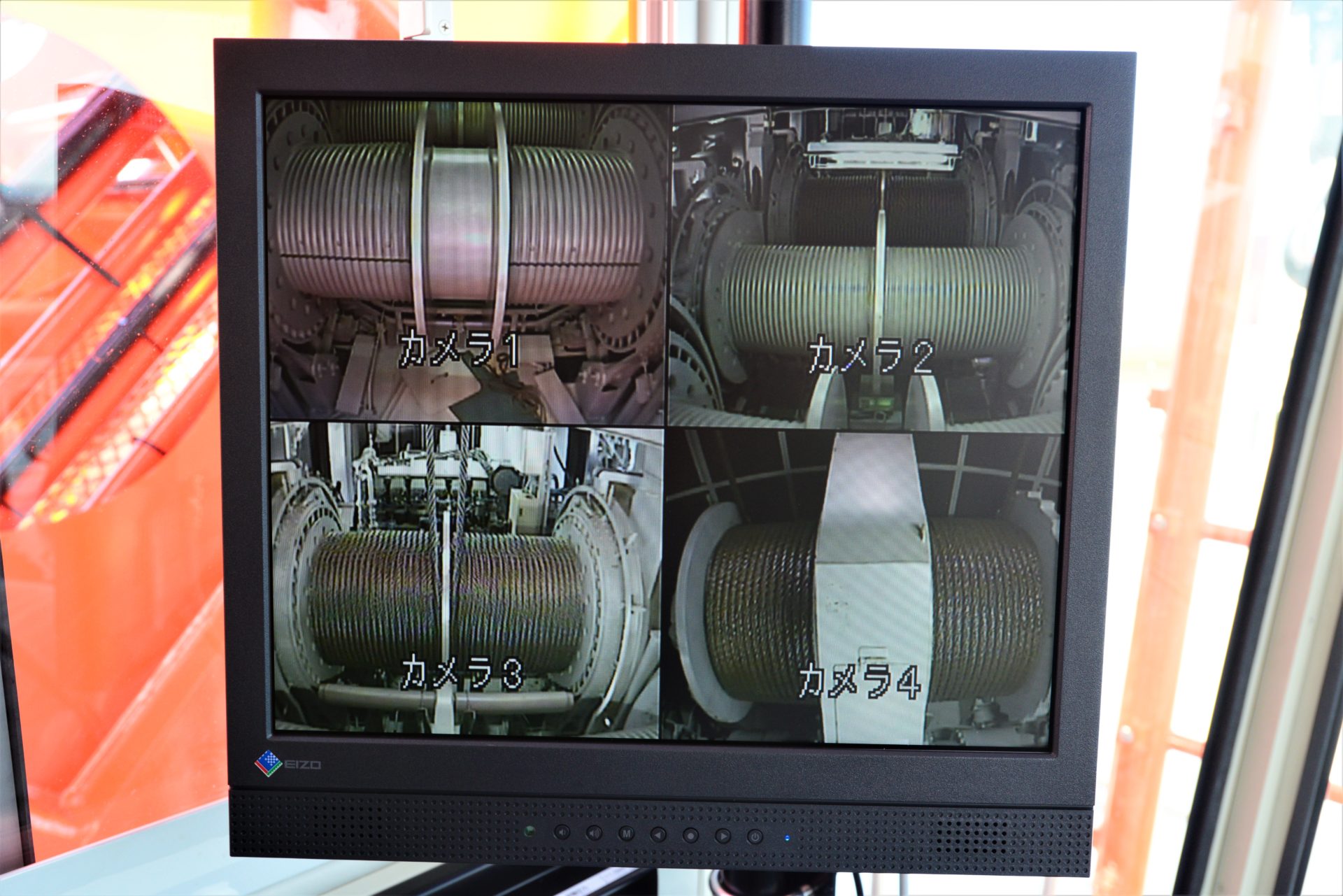
オペレーターの安全を守る監視カメラとセンサー、アラーム装置
ドラムを監視するカメラが搭載されており、ワイヤーの状態を確認できます。
また、各過巻・過荷重に反応するアラーム機能、昇降階段に設置されたセンサーによる旋回動作ストップ等、安全確保のための様々な装置が取り付けられています。

シンプルな操作で、スムーズにバケットを開閉可能
支持および開閉レバーをクラッチに入れることで、操作レバー1本でバケットの巻き上げ、巻き下げが可能です。
また開口度計により、バケット開口度は0〜100%表示でリアルタイムに確認できます。

オペレーターが使いやすい操作環境に設定可能
トルクコンバーターの速度制御、トルク制御、クレーンの様々な動作を制御する要素は、オペレーターの使いやすい設定に調整が可能です。
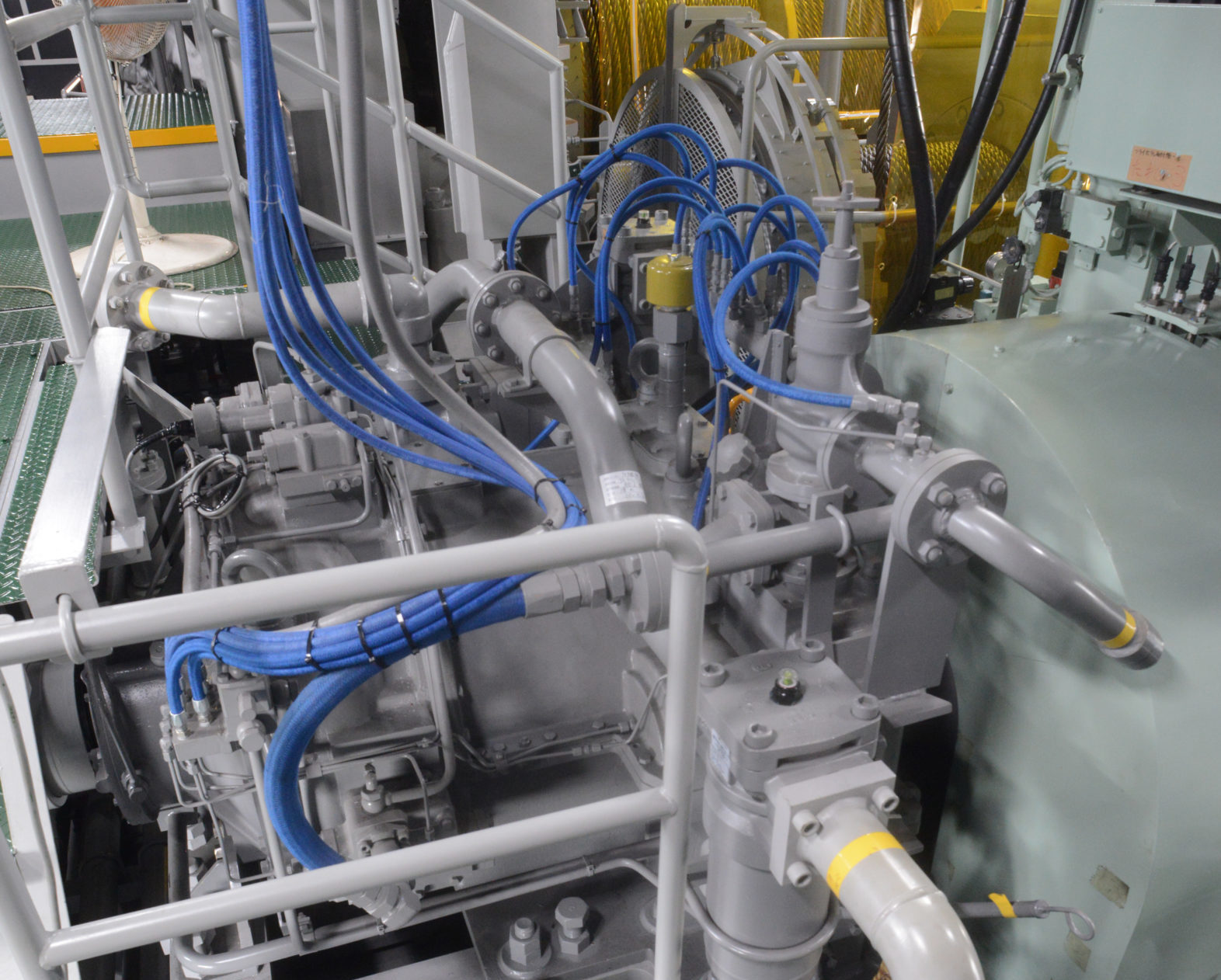
オメガクラッチ付トルクコンバーター
SKK独自開発のトルクコンバーター。電子制御によってパワフルでスムーズな動作と、繊細な速度コントロールができます。浚渫量の重さ、負荷に応じて巻上速度を自動で変化させることで、運転時の衝撃を和らげ、スムーズでストレスの少ない操作性を実現しています。
導入事例/実績
-

宇部港本港地区航路 浚渫工事
山口県宇部港
第55海栄号(SKK-30030GDT-K)
第51海栄号(SKK-30025GDT-L)
宇部工業株式会社 殿
主なオプション
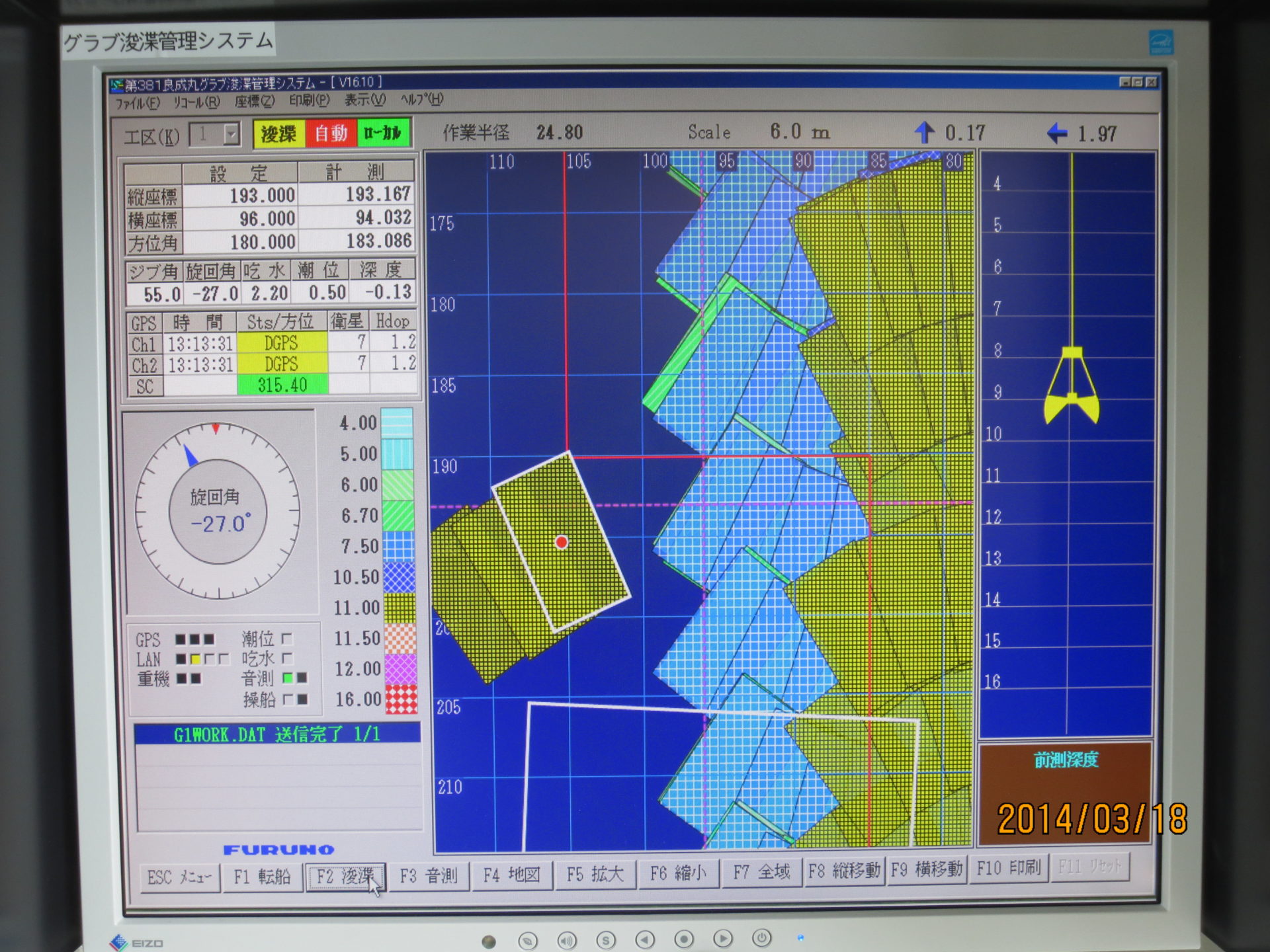
GPSグラブ施工管理システム
作業位置・浚渫深さをリアルタイムにモニターで確認できます。事前に目標を設定することで、モニターを通じて作業進捗を確認でき、正確で無駄のない操作が可能になります。また、作業は記録されているため、振り返りや報告に活用することができます。

水平掘制御装置・深度計/開口度計
水平掘制御装置は、SKKが1989年に開発した海底の浚渫跡が水平になるよう、バケットを降下させる制御システムです。バケットの降下深度を自動的に検出・制御でき、浚渫の掘り残しを大幅に減少させることに成功。迅速で、高精度な浚渫作業が可能になりました。
深度計は、設定深度でのバケットの自動減速及び自動停止を可能にする計測器です。着底後のロープの繰り出しもなく、作業時間の短縮に繋がります。また、開口度計によりバケットの開口度を0〜100%の幅で確認することができます。

フックポケット
使用していないフックをポケットに格納することにより固定します。これによりフックを取り外すことなくバケット作業を行う事が可能です。作業時間の短縮に繋がります。